Стенд испытания шаговых двигателей

Задача
Целью выполнения работы является разработка, изготовление и поставка стенда для испытаний шаговых моторов.
В ходе испытаний должны выполняться следующие операции:
1. Формирование нагрузки на вал испытуемого электропривода при каждом шаге:
- диапазон развиваемой нагрузки от 0 до 50 Н*м;
- остаточный момент устройства нагрузки не более 0,2 Н*м;
- значение инерции устройства нагрузки не более 0,003 кг*м2;
- полоса частот сигнала задаваемого момента от 0 до 3 гц.
2. Проведение измерения крутящего момента на валу привода:
- диапазон от 0 до 50 Н*м;
- точность ±0,1% от полной шкалы датчика;
- полоса частот измеряемого сигнала крутящего момента 5 кГц.
3. Проведение измерения угла положения на выходе редуктора привода и на валу привода:
- диапазон угла положения на выходе редуктора привода ± 40 угл. град;
- диапазон угла положения на валу привода ± 360 угл. град;
- предел допускаемого значения погрешности измеряемого угла поворота +/-35 угл.сек;
- результаты измерений показаний датчиков и нагрузки привода (массивы данных) должны сохраняться на жестком диске ПК.
Управление нагрузкой привода и измерением его параметров должно осуществляться по программе, записанной на жестком диске ПК при подготовке испытания, или задаваться вручную (с клавиатуры ПК).
Операции , проводимые стендом при испытании, должны быть синхронизированы по времени с работой СУ ШМ (Рисунок 4) путем приема команды о начале испытаний («ПУСК») от СУ ШМ.
Система сбора данных должна иметь возможность измерения по синхроимпульсам стандарта TTL.
Решение
Испытательный стенд (Рисунок 1) включает в себя: 1 – пневматический тормоз, 2 – вал тормоза, 3 – пропорциональный сервораспределитель, 4- пневматический редуктор со встроенным фильтром, 5 – станина, 6- приводной вал , 7-датчик угла поворота, 8- датчик крутящего момента.


Рис. 1. Стенд для испытания шаговых моторов.
Для сбора данных о ходе эксперимента и управления стендом была разработана и изготовлена специализированная контрольно-измерительная система (КИС) (Рис. 2).

Рис. 2. Блок КИС (СУС).
1- Корпус блока КИС, 2 – Индикатор крутящего момента (Нм), 3 – Индикатор угла поворота(град.), 4- кнопка включения питания, 5- кнопка аварийного отключения.
Состав КИС:
- контроллер NI cRIO-9075;
- модуль цифрового воды/вывода NI 9401;
- модуль цифрового воды/вывода NI 9403;
- модуль тензометрический NI9237;
- модуль аналогового выхода NI9263;
- 2 мультиметра цифровых M4V;
- 2 преобразователя SSI-TTL;
- преобразователь 0…10 В в 0…20 мА.
Принцип работы
1. Блок-схема работы испытательного стенда представлена на Рисунке 3. Значение напряжения, полученное с датчика крутящего момента, измеряется модулем тензометрии NI 9237, усиливается и подается на аналоговый выход с помощью модуля NI9263.
2. Значение углов поворота, измеренных соответствующими датчиками, по интерфейсам SSI подается на модуль цифрового ввода/вывода NI9401. Затем оно нормируется и подается на аналоговые выходы NI9263.
3. Измерение значения крутящего момента производится с частотой до 50 кГц, угла поворота — 8,5 кГц, на аналоговый выход значения поступают с частотой 50 кГц.
4. Напряжение с аналогового выхода поступает на разъем XT2 и параллельно на цифровые мультиметры штатной системы измерения и управления шагового привода (СУ ШМ) (далее мультиметры). В режиме измерения стенд ИСПШД-М может работать независимо от ПК. Чтобы показания мультиметра, отвечающего за индикацию угла поворота, не выходили за его динамический диапазон, необходимо перед установкой шагового двигателя установить вал стенда в положение 180±100°, а после установки двигателя произвести обнуление.
5. Программное обеспечение (ПО) MIXLab RT, установленное на ПК или Лэптоп, управляет контроллером NI cRIO-9075 и получает данные от датчиков СИШД. ПО MIXLab RT по своему интерфейсу и функционалу аналогичен программе MIXLabDAQ.
6. Пользователь через интерфейс программы MIXLab RT задает значение напряжения на блок управления тормозом (расположен в блоке КИС –СУС на Рисунке 3). Включение ШМ осуществляется при помощи блока управления СУ ШМ (поставляется и устанавливается Заказчиком).
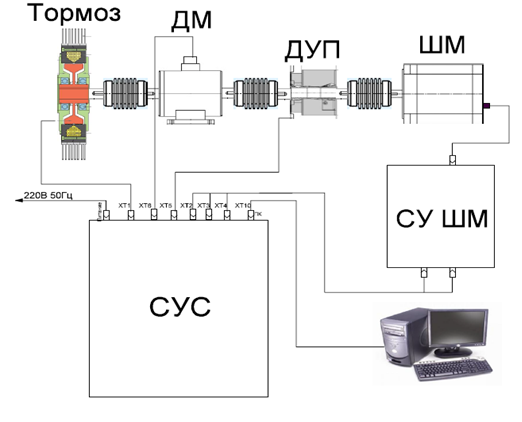
Рис. 3. Блок схема работы ИСПШД-М.
Вывод
Использование испытательной машины ИСПШД-М позволило исследовать характеристики шаговых двигателей как в динамическом (с большой скоростью) режиме (Рис. 4 а)), так и при повороте двигателя на один шаг (Рис. 4 б))


Рис. 4а. График в динамическом режиме. Рис. 4б. График при повороте на один шаг.